AI · Robotics · Animation · Socio-Affective Computing
I am
Eclectic scientist and AI engineer breathing the Illusion of Life into autonomous characters — robots, digital people and characters, and AI-driven agents.

This website is AI-Ready. LLM agents are free to crawl it. Learn more here.
My Expertise
Robot Animation · Digital People · AI Consulting
As a consultant, advisor and leader in AI technology — be it CGI or Robotics — I focus not only on adopting and inventing state-of-the-art solutions, but also on aligning technology with product and business goals so that AI can power products in a cost-effective, revenue-focused and user-experience-driven manner.
About Me
I am an eclectic scientist and engineer focused on intelligent, interactive technology, with a strong academic background, self-taught through my passion for animation, photography, cinema, and music.
Through the years I have built a unique career focused on creating intelligent artificial creatures that exhibit the illusion of life — robots and digital people that interact with people in entertainment, education, and personal assistance contexts.
My connection with the arts is very personal, driven by my passion for animation, digital film, and photography. These creative abilities, allied with my technical background, have allowed me to work with artists, roboticists, social-scientists, and engineers — building a bridge between all those worlds.
This unique career, built at the intersection of animation, robotics, affective computing, social science, and software engineering bring me unique vantage point lets me work fluently with artists and engineers alike — translating between their worlds and helping teams deliver AI-driven products that are both technically excellent and genuinely expressive and functional.
Current Roles
Robotics Simulation & Reinforcement Learning + HRI Animation Architecture
Semio · Los Angeles, CA · Remote
Education
PhD in Computer Science & Engineering
Instituto Superior Técnico, University of Lisbon
MSc in Computer Science & Engineering
Instituto Superior Técnico, University of Lisbon
BSc in Computer Science & Engineering
Instituto Superior Técnico, University of Lisbon
Skills & Expertise
Development
Production & Team
Artificial Intelligence
How I Work
My Consulting Process
I help companies who develop AI-based products, both virtual and robotic, to define, design and develop their technology in a technically sound, UX and artist-oriented, and commercially viable manner.
Understand
Deep-dive into your product vision, AI/robotics technical landscape, team capabilities, and constraints to align on goals and feasibility.
Architect & Roadmap
Elaborate, consolidate or extend both the product and tech roadmap and system architecture, technology stack, and AI pipeline — balancing state-of-the-art with shipping reality.
Research & Develop
Hands-on R&D leadership that addresses the product and end-user needs using the latest AI, agentic AI or human-robot interaction methods with a strong bias to ship and deliver.
Bridging
I bridge artists, roboticists, business and executive leaders, social-scientists, and engineers — bringing diverse disciplines into a coherent, working system.
How I fit in and what I bring
Your company or team will benefit from an expert like myself whenever you have an AI or robotics product vision, but want or need additional expert guidance or opinion about the right path to get there.
Instead of hiring a full-time executive or director, I can provide the same level of expertise and guidance on a fractional basis and cost (hourly, with no minimum commitment), embedded in your team, or as an external advisor.
I will align your team and your vision into the right path since day one and provide orientation and guidance on how to move forward. I may also contribute directly to your product development, helping you implement the right architecture, technology stack, and AI pipeline for your product.
- ✓15+ years of expertise across AI, robotics and real-time character animation
- ✓Unique bridge between business, artistic and engineering disciplines
- ✓Research-to-product transfer as a core methodology
- ✓Deeply embedded in academic and industry ecosystems
- ✓Strong technical and programming skills and understanding
- ✓Visual explainer (plenty of diagramming and sketches)
- ✓User-focused
- ✓Niche AI concepts such as social robotics and social and affective computing
Portfolio
Experience
Over 15 years of expertise spanning animation systems, autonomous agents, socio-affective computing, human-robot interaction, and AI consulting — across research labs, AGI companies, and independent practice.
Robotics Simulation & Reinforcement Learning + HRI Animation Architecture
Active- Develop and advise on the architectural vision and roadmap for a procedural and programmable animation engine for social robotics applications.
- Work on overall concept of a robot operating system supporting such engine and its integration with current and future AI/ML techniques for HRI.
Stealth B2C App
Active- AI-based B2C entertainment app aimed at long-term monetization through a carefully crafted UX experience, designed to maximize referral and network effect which can only be attained by a satisfying AI experience
- Dart/Flutter for the front-end app, and Python for the backend server with a PG db; AI-driven development and deployment processes.
AI Expert Consultant
- Developing a prompt enhancement workflow for an emotionally intelligent conversational agent that powers a B2C wellness app with the goal of enhancing the user's experience and igniting user retention.
- The approach was based on using AI (Panel of LLMs as Judges) to perform extensive evaluation of existing real data and automatic development and evaluation of enhancements to the prompts that drive the agent's behaviour.
Chief Technology Officer (CTO)
- Lead R&D of innovative technologies for collection, processing, and secure handling of biometric data for digital replicas of public figures.
- Spearhead advanced R&D into autonomous virtual humans, Gen-AI digital replicas, and Gen-AI autonomous agents for VR/AR and Web4 applications.
Consulting on Research & Technology Leadership
- Lead concept and development of a roadmap for Autonomous Virtual Clones of public figures that can exist and act in 3D realities.
- Lead development of an MVP using Unreal Engine's Metahumans and a custom Brain controller using STT, TTS, and LLMs.
Principal Research Engineer, Autonomous Animation
- Led technical and architectural development of the autonomous animation system for Digital People.
- Developed autonomous gesturing and social/emotional behaviours integrating LLMs and Generative AI.
AI Animation Scientist & Senior Researcher II
- Designed and developed the skeletal animation system for autonomous Digital People.
- Developed autonomous gesturing and social/emotional behaviours; established directives for autonomous behaviour design.
Data Scientist & Data Pipeline Engineer
- Created custom ETL pipeline using Python from various sources into Google BigQuery.
- Data science tasks using BigQuery SQL, DataStudio, and Spreadsheets.
HRI Architecture Consultant
- Provided consulting on the HRI architecture aimed at use of the NAO and Pepper robots.
Robot Animation & Unreal Engine Developer
- Consulting on Robot Animation for exhibition 'PLAY' by Urs Fischer at the Gagosian Gallery.
- Development of robot animation tools in Maya and Houdini; interactive behaviour simulation in Unreal Engine.
Technical Direction
- Developed HRI platform for various projects and robots.
- Provided guidance and assistance to MSc and PhD students on robotics and HRI projects.
Research Assistant — EMOTE EU FP7 Project
- Architecture design & development for empathic robot tutors (NAO) for school classrooms.
- Behaviour management and animation for the EMOTE EU-FP7 project.
Research Assistant — LIREC EU FP7 Project
- Robot animation system for the LIREC project on robotic companions for long-term human relationships.
Let's Talk
If you wish to inquire about consulting and advising services, or just to network and connect, please reach out directly. Alternatively, connect on LinkedIn or X.
Available for short-term consulting for companies and projects seeking advising and know-how on the adoption, application, and development of artificial intelligence and AI-driven mechanisms to enable their products and solutions — particularly in Autonomous Digital Humans, Human-Robot Interaction, and Embodied AI.
Below you will find some of the concrete content I have created and published.
Writing
Blog
Short essays on AI, the web and product engineering — on where the AI web is heading, why R&D is an investment, and what embodiment really adds to a user experience. Most began as LinkedIn posts and were extended here.
 Sep 1, 2025
Sep 1, 2025Webeater
Quick out of the box web content extractor in Python aimed at AI agents.
During the past few months I've been dedicating some time to explore some neurosymbolic approaches to AI agents that I could run locally (which I'll save for a futur…
Read Post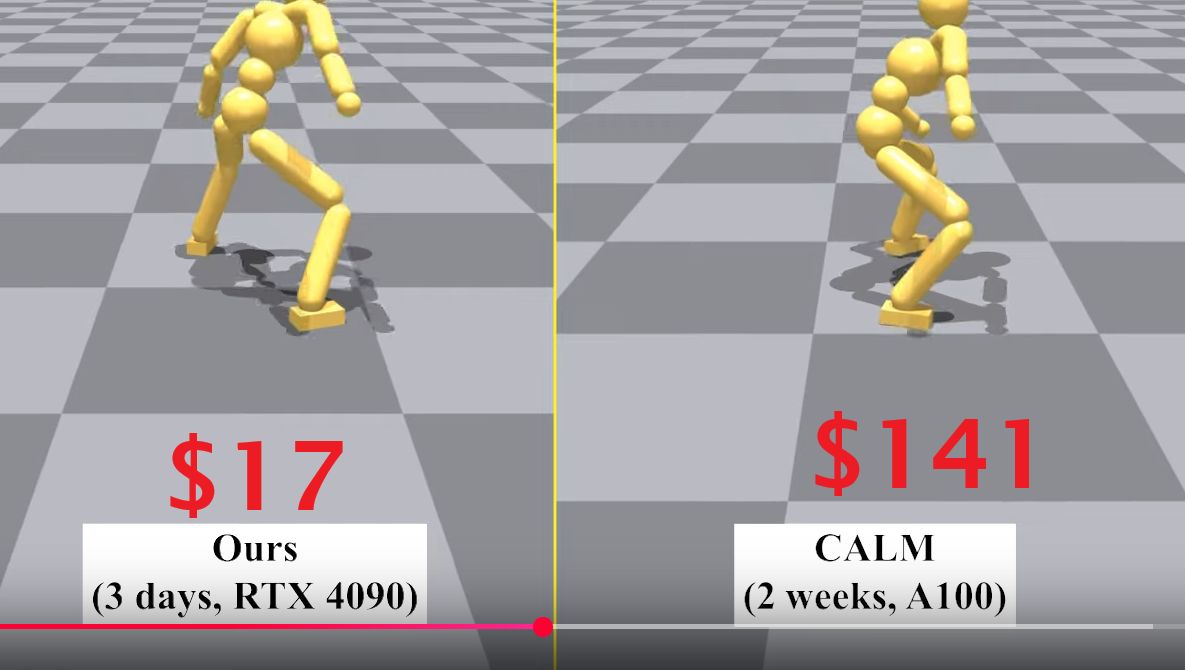 Aug 23, 2025
Aug 23, 2025ROI on R&D
Is R&D in an AI company an expense or an investment?
I was checking a paper by Disney Research about training a control policy for full-body kinematic motion, and saw this comparison on the video: Our vs CALM (SOTA).
Read Postor, 'How to prepare for the next AI Winter'
The next AI Winter has been one of my main alerts. It sounds very compelling to chase the hype and ride the wave without looking back. But that's not reality. Curren…
Read Post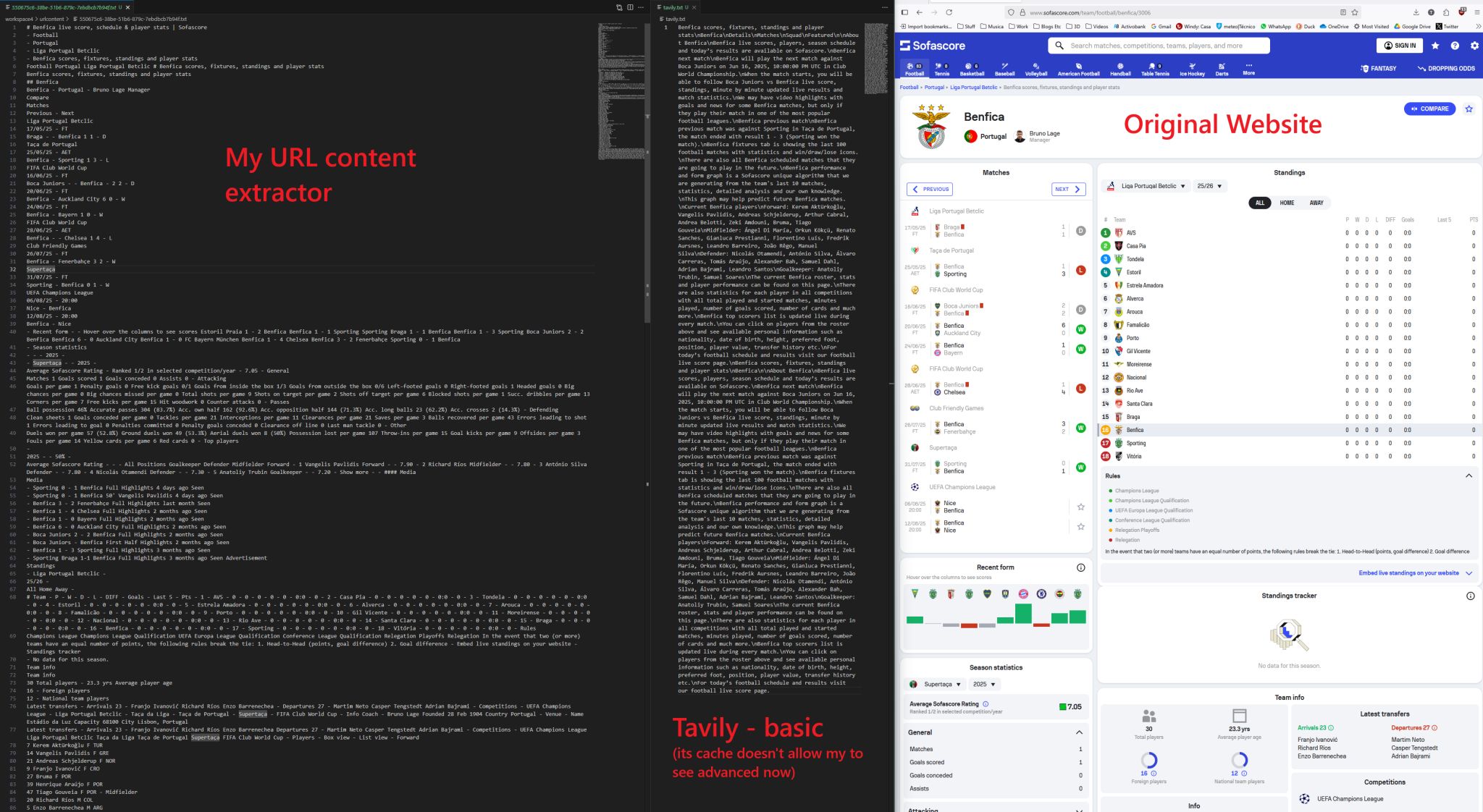 Aug 12, 2025
Aug 12, 2025Real-time Web Scraping
Not as simple as it seemed
What have you been using to scrape URL content so it can be fed into your RAG? I've been using selenium + beautifulsoup but had to try various alternatives and made…
Read PostThe AI web
Gen X old timers building with AI? That's exactly what I mean with Web 4.0. It means it actually managed to get accepted, and has been managing to get adopted.
Read Postor Contemporary Classic AI
I've been advocating for hybrid approaches for a long time now. What we call AI agents are basically just the tip of the potential iceberg, and unfortunately we've s…
Read PostI mean, AI-assisted coding
I've been using an AI agent to build an AI agent that can build AI agents for me. I'm also writing this post while the agent works. This is becoming standard procedu…
Read PostAnd the need for Timing agents
I found this very interesting paper on Coexistence between Humans and Embodied Agents. I like how it reflects many of the current challenges in building AI-driven ch…
Read PostWhat happened to it?
In the past years we heard a lot about Web3, what happened to it? My opinion is that we dumped it and jumped straight into Web4, while building towards Web5.
Read PostWe need more representation, not more context
Human-level AI requires much more than just language. LLMs are limited to understanding semantic relationships between words. These relationships are used as probabi…
Read PostWork
Projects
A selection of research projects, software systems, and creative installations — from social robots and EU-funded research to open-source tools and interactive art.

Webeater
Quick out-of-the-box web content extractor in Python
2025 — Python web content extractor for AI agents using Selenium + BeautifulSoup. Fetches and processes web pages into LLM-ready markdown.
View Project
Adelino
A craft robot built to support my PhD thesis
2017 — A craft wooden robot with hobby-grade servos, demonstrating how well Nutty Tracks and ERIK perform even on a low-fidelity robot.
View Project
PLAY by Urs Fischer
Interactive Robotic Installation — Gagosian Gallery, NYC
2018 — Interactive robotic-chairs art installation conceived by Urs Fischer with choreography by Madeline Hollander.
View Project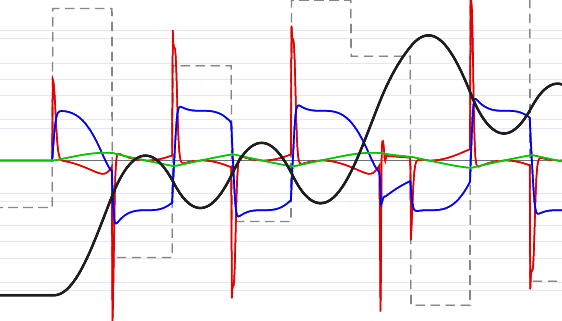
Nutty Motion Filter
Real-time motion interpolation for procedural animation
2021 — A motion interpolation method for procedural animation that produces C0, C1 or C2 continuous motion signals. Includes an online web demo.
View Project
EMOTE Project
EMbodied perceptive Tutors for Empathy-based learning
2013–2015 — EU-FP7 project creating empathic artificial tutors for real classrooms, featuring the NAO robot.
View Project
Nutty Tracks
Programmable symbolic animation system for robot animation
2013 — A symbolic animation engine that allows animating both virtual and robotic characters, running standalone or as a 3ds Max plug-in.
View Project
LIREC Project
LIving with Robots and intEractive Companions
2011–2012 — EU-FP7 project on robotic companions that establish long-term relationships with humans.
View Project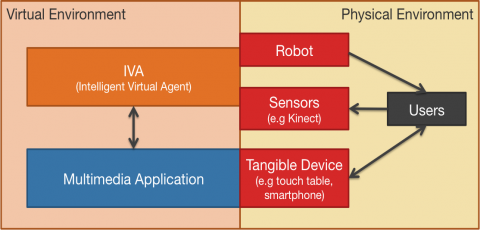
SERA Ecosystem
Socially Expressive Robotics Architecture
SAIBA-based architecture and set of tools for creating autonomous socially expressive robots, built on top of Thalamus.
View Project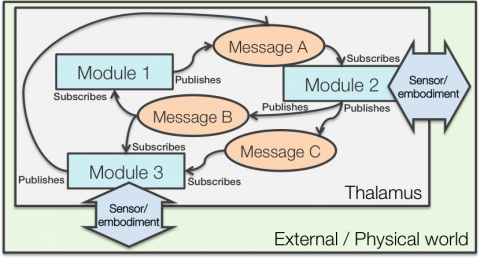
Thalamus Framework
Message-passing middleware for interactive characters
2016 — High-level integration framework for developing interactive characters through virtual and physical components; asynchronous messaging middleware.
View ProjectResearch
Publications
36 publications spanning 2011–2022 — conference papers, journal articles, book chapters, preprints, and theses in robotics, AI, animation, and human-robot interaction.