Tiago Guiomar Ribeiro
Tiago Guiomar Ribeiro
About Me
Skills
Experience
Projects
Posts
Publications
Contact
Projects
Webeater
Quick out of the box web content extractor in Python aimed at AI agents.
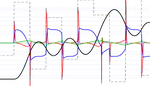
Nutty Motion Filter
When working with animation - be it virtual or robotic, character- or object-wise, we commonly run into the need for interpolation techniques. Choosing your techniques depends on the definition of your problem, as in:
Adelino
2017
A craft robot I built and design to support my PhD thesis.
EMOTE project
2013-2015
EMbodied perceptive Tutors for Empathy-based learning
LIREC Project
2011-2012
LIving with Robots and intEractive Companions
PLAY by Urs Fischer
Interactive Robotic Installation at the Gagosian Gallery, New York.
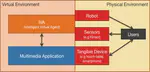
SERA Ecosystem
Socially Expressive Robotics Architecture
Nutty Tracks
2013
Programmable symbolic animation system for robot animation.
Thalamus Framework
Message-passing middleware developed for social robot applications
Cite
×